< Previous | Contents | Manuals Home | Boris FX | Next >
Find Erratic Trackers
This tool, which appears in the Track as well as Script menus, is used to find bad trackers before solving a shot, specializing in moving vehicles and phantom points. See Find Erratic Trackers in the main User Manual for more discussion. Here is the user interface with default settings:
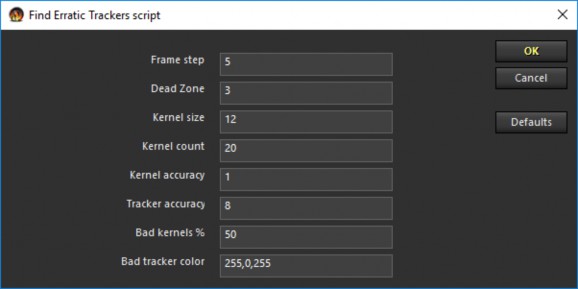
Clearly there are a number of parameters to it, each discussed below. The default values are intended to be satisfactory in many cases. The output of the Find Erratic Trackers tool presents extra information that can allow some important parameters to be more thoughtfully adjusted, as discussed further below.
Frame Step. A number of frames. The tool only examines every N frames, in this example, every 5 frames. This saves some time. To be checked, trackers must be valid for at least twice the sum of the frame step and dead zone.
Dead Zone. A number of frames. Automatically-generated trackers frequently have little tails at the beginning or end of their lifetime, as features emerge or go behind foreground features. This control eliminates this many frames at the beginning or end of its life from consideration. (Intended primarily for automatic trackers, it does not affect the interior lifetime of shots, only the ends.) See the Frame Step for a discussion of how long trackers must be valid for consideration.
Kernel size. A number of trackers. This is the minimum number of trackers (at least 10) required to form each kernel, which is used to evaluate other trackers. Larger kernels do a better job of suppressing noise in tracker positions in order to make more accurate predictions, but larger kernels require that more trackers be valid on pairs of frames, reducing the number of frames and thus trackers that can be checked.
Kernel count. A number of kernels. The number of kernels that will be used to evaluate each pair of frames considered. More kernels better accommodate situations featuring many noisy trackers, where individual kernels may be bad. More kernels take more time, but more significantly, the need to have additional
novel kernels increases the number of trackers required for any pair of frames, in order to perform.
Kernel accuracy. Horizontal pixels. Kernels must be able to predict their own tracker locations within this many pixels in order to be considered accurate enough to be useful (ie, that the kernel itself doesn't contain bad trackers).
Tracker accuracy. Horizontal pixels. Non-kernel trackers that have an error exceeding this value are considered to be bad on this kernel. If a tracker is bad on too many kernels, it will be considered to be erratic and tagged for repair or deletion.
Larger and smaller values affect the tradeoff between more false positives and negatives.
Bad Kernel %. Percentage. A tracker that is bad on more than this percentage of the kernels will be considered to be erratic.
©2024 Boris FX, Inc. — UNOFFICIAL — Converted from original PDF.